test_urdf_parameter
1. Basic Features
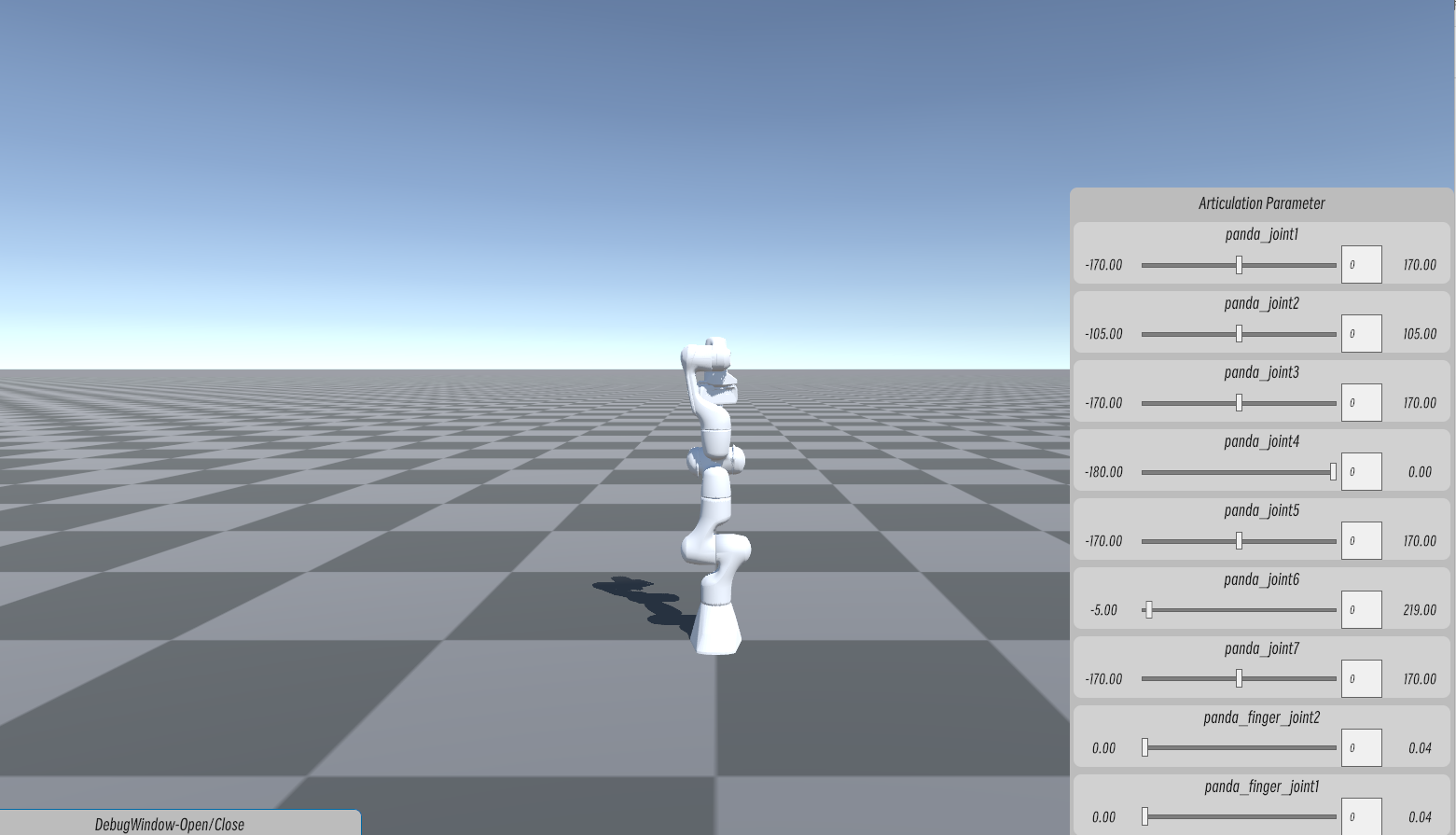
Display the joint target position setting panel
2. Implementation Process
2.1 Initialize the Environment
env = RFUniverseBaseEnv()
2.2 Initialize the Robotic Arm
robot = env.LoadURDF(path=os.path.abspath("../URDF/Franka/panda.urdf"), axis="z")
robot.SetTransform(position=[0, 0, 0])
robot.EnabledNativeIK(False)
LoadURDF: Imports a model from a URDF file.EnabledNativeIK:native_ikis a plugin. When set tofalse, interfaces likeIKTargetDoMovecannot be used, and each joint’s position must be set manually (usingsetJointPosition). Conversely, when set totrue,setJointPositioncannot be used to manually set positions.
2.3 Display the Joint Target Position Setting Panel
env.ShowArticulationParameter(robot.id)