test_gelslim
1 Basic Features
Demonstrate GelSlim tactile sensor simulation.
2 Implementation Process
2.1 Initialize the Environment
env = RFUniverseBaseEnv(ext_attr=[GelSlimAttr])
2.2 Demonstrate GelSlim Tactile Sensor Simulation
gelslim = env.InstanceObject(name="GelSlim", attr_type=GelSlimAttr)
gelslim.SetTransform(position=[0, 0, 0])
target = env.InstanceObject(name="GelSlimTarget", attr_type=attr.RigidbodyAttr)
target.SetTransform(position=[0, 0.03, 0], rotation=[90, 0, 0])
env.SetViewTransform(position=[-0.1, 0.03, 0.], rotation=[0, 90, 0])
InstanceObjectto instantiate the GelSlim sensor.SetTransformto set the sensor and object at appropriate positions and orientations.SetViewTransformto set the viewing angle at an appropriate position and orientation.
for i in range(50):
env.step()
target.AddForce([0, -1, 0])
AddForceto apply the given force to a rigid body.
gelslim.GetData()
env.step()
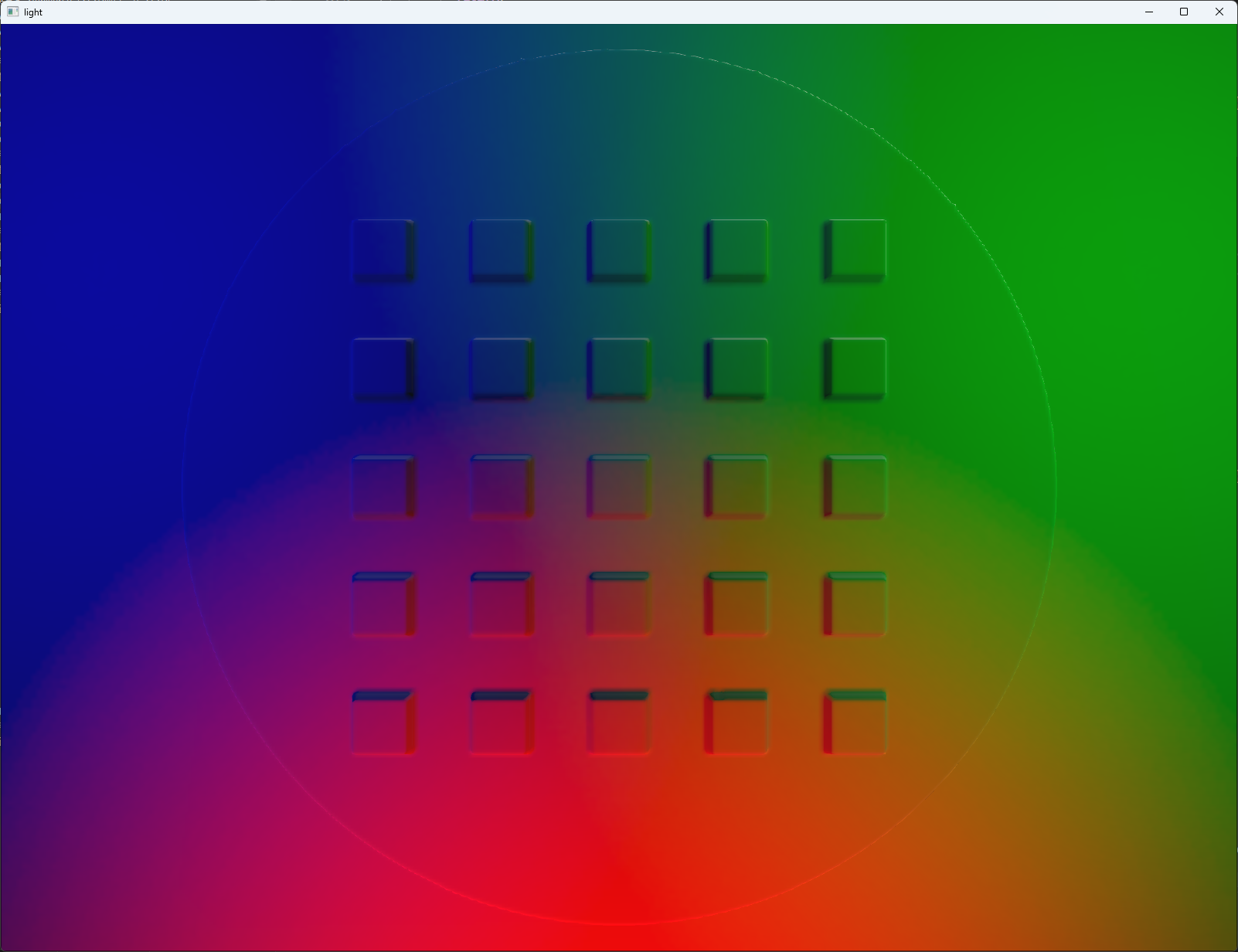
image = np.frombuffer(gelslim.data["light"], dtype=np.uint8)
image = cv2.imdecode(image, cv2.IMREAD_COLOR)
cv2.imshow("light", image)
cv2.waitKey(0)
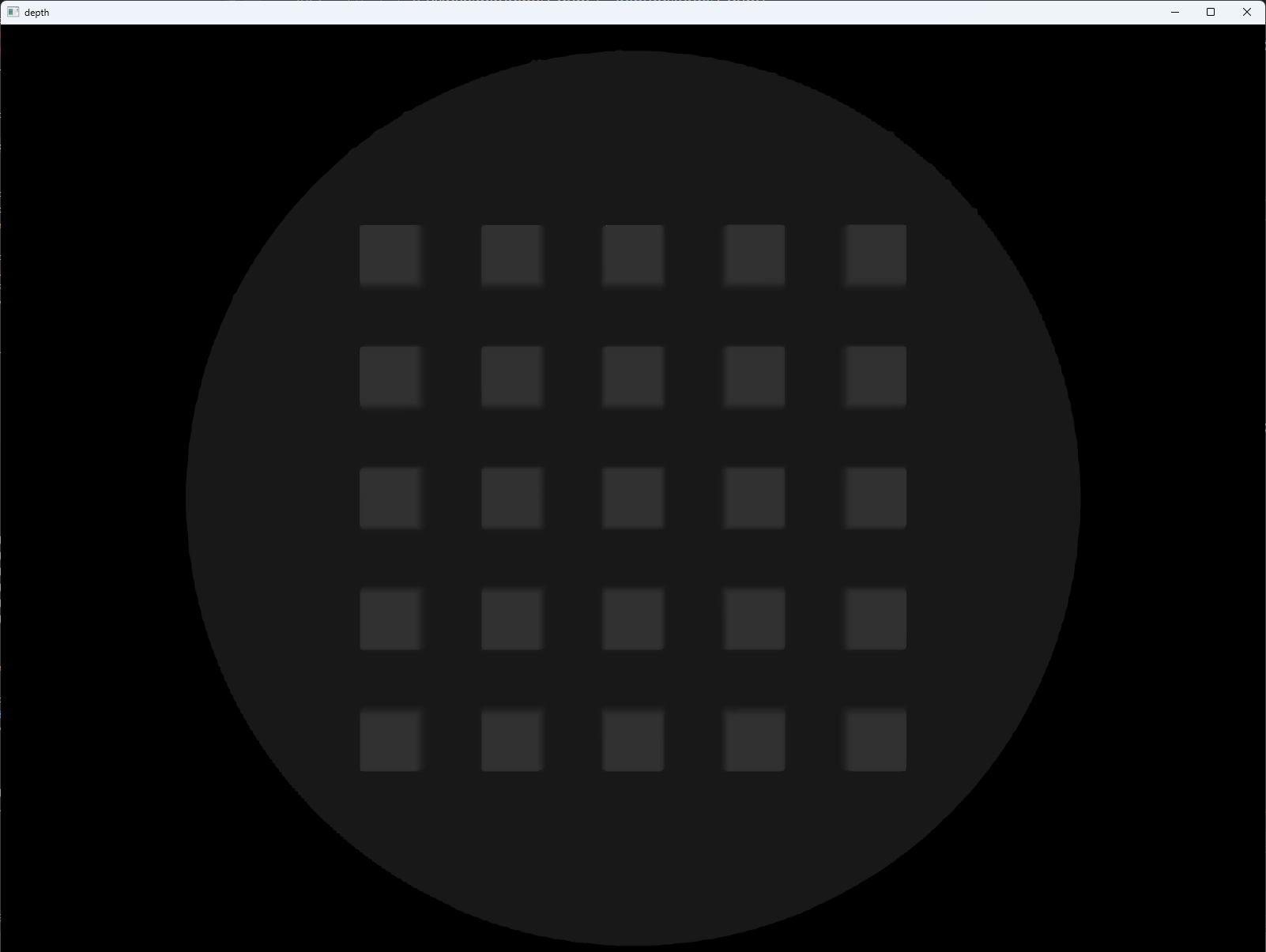
image = np.frombuffer(gelslim.data["depth"], dtype=np.uint8)
image = cv2.imdecode(image, cv2.IMREAD_GRAYSCALE)
cv2.imshow("depth", image)
cv2.waitKey(0)
Call
GetDataon the GelSlim sensor object to retrieve the sensor data, then use the cv2 module to display it.
gelslim.BlurGel()
gelslim.GetData()
env.step()
image = np.frombuffer(gelslim.data["light"], dtype=np.uint8)
image = cv2.imdecode(image, cv2.IMREAD_COLOR)
cv2.imshow("light", image)
cv2.waitKey(0)
image = np.frombuffer(gelslim.data["depth"], dtype=np.uint8)
image = cv2.imdecode(image, cv2.IMREAD_GRAYSCALE)
cv2.imshow("depth", image)
cv2.waitKey(0)
env.Pend()
env.close()
Calling
BlurGelon the GelSlim sensor object can blur the gel mesh, simulating smooth deformation.