test_label
1 Basic Functions
Demonstrate 2D scene labeling feature
2 Implementation Process
2.1 Initialize the Environment
env = RFUniverseBaseEnv(scene_file="SimpleYCBModel.json")
2.2 Display Interactive Heatmap
camera = env.GetAttr(981613)
camera.GetRGB(512, 512)
camera.GetID(512, 512)
camera.GetNormal(512, 512)
camera.GetDepth(
0.1,
2.0,
512,
512,
)
camera.GetAmodalMask(655797, 512, 512)
camera.Get2DBBox(512, 512)
camera.Get3DBBox()
Call the camera object’s corresponding interface to capture different types of images
GetID: Obtain the object segmentation image in the sceneGetNormal: Obtain an image representing the direction of the object’s surface normal with colorGetDepth: Obtain a depth map, the first two parameters are the minimum and maximum distances for the calculation, respectivelyGetAmodalMask: Obtain the amodal mask of a specified object, the first parameter is the object’s IDGet2DBBox: Obtain the 2D bounding box of the objects in the sceneGet3DBBox: Obtain the 3D bounding box of the objects in the scene
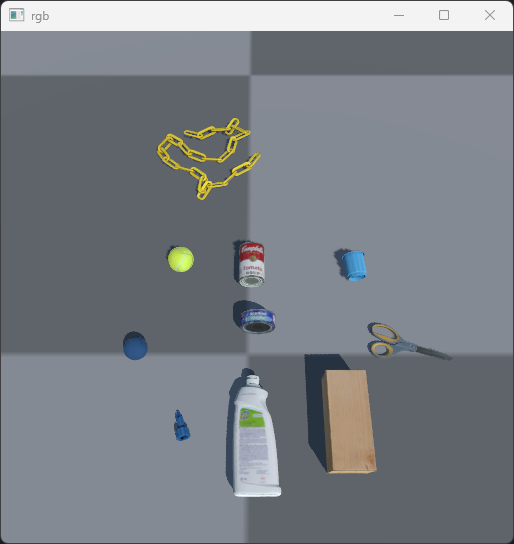
# rgb
rgb = np.frombuffer(camera.data["rgb"], dtype=np.uint8)
rgb = cv2.imdecode(rgb, cv2.IMREAD_COLOR)
cv2.imshow("rgb", rgb)
cv2.waitKey(0)
# normal
normal = np.frombuffer(camera.data["normal"], dtype=np.uint8)
normal = cv2.imdecode(normal, cv2.IMREAD_COLOR)
cv2.imshow("normal", normal)
cv2.waitKey(0)
# depth
depth = np.frombuffer(camera.data["depth"], dtype=np.uint8)
depth = cv2.imdecode(depth, cv2.IMREAD_COLOR)
cv2.imshow("depth", depth)
cv2.waitKey(0)
# amodal_mask
amodal_mask = np.frombuffer(camera.data["amodal_mask"], dtype=np.uint8)
amodal_mask = cv2.imdecode(amodal_mask, cv2.IMREAD_COLOR)
cv2.imshow("amodal_mask", amodal_mask)
cv2.waitKey(0)
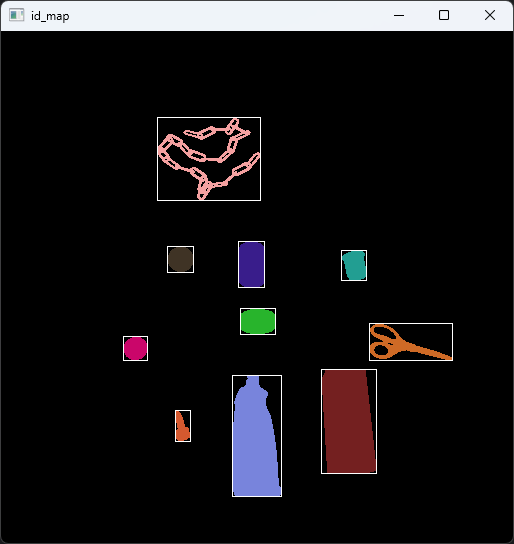
# 2d_bounding_box
id_map = np.frombuffer(camera.data["id_map"], dtype=np.uint8)
id_map = cv2.imdecode(id_map, cv2.IMREAD_COLOR)
print("2d_bounding_box:")
for i in camera.data["2d_bounding_box"]:
print(i)
print(camera.data["2d_bounding_box"][i])
center = camera.data["2d_bounding_box"][i][0:2]
size = camera.data["2d_bounding_box"][i][2:4]
tl_point = (int(center[0] + size[0] / 2), int(512 - center[1] + size[1] / 2))
br_point = (int(center[0] - size[0] / 2), int(512 - center[1] - size[1] / 2))
cv2.rectangle(id_map, tl_point, br_point, (255, 255, 255), 1)
# 3d_bounding_box
print("3d_bounding_box:")
for i in camera.data["3d_bounding_box"]:
print(i)
print(camera.data["3d_bounding_box"][i])
cv2.imshow("id_map", id_map)
cv2.waitKey(0)
env.Pend()
env.close()
Display the obtained images