test_debug
1 Basic Functions
Cycle through the functionalities of various debug modules.
2 Implementation Process
2.1 Initialize Environment
env = RFUniverseBaseEnv(scene_file="DebugScene.json")
Import the scene from a pre-configured
DebugScene.jsonfile.
2.2 Debug Functionality Demonstration
The debug functions mentioned below can accept a boolean variable named
enableto toggle the corresponding debug feature on or off.
2.2.1 DebugGraspPoint
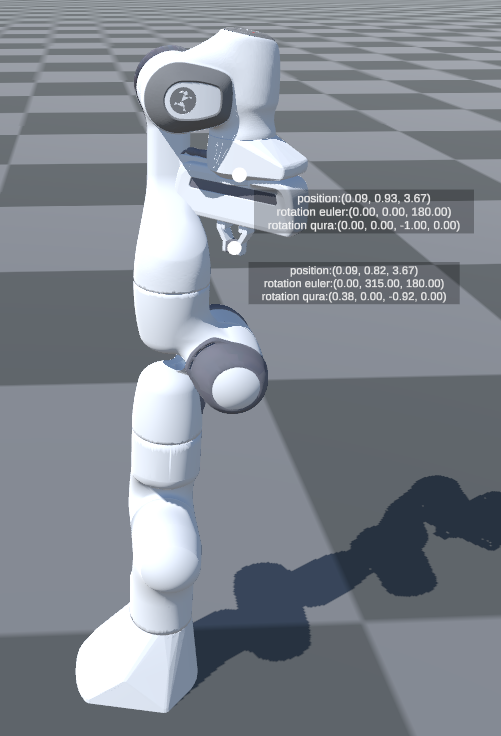
env.DebugGraspPoint()
env.SendLog("DebugGraspPoint")
env.step(300)
env.DebugGraspPoint(False)
DebugGraspPointcan show or hide the position and orientation information of the end-effector of the robotic arm.
2.2.2 DebugObjectID
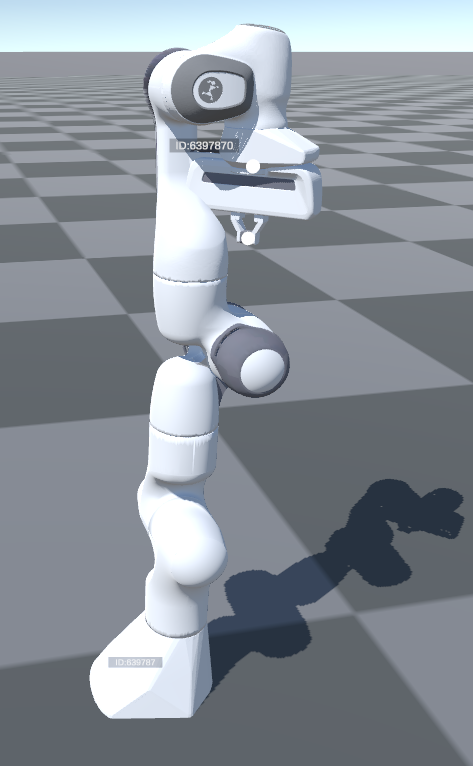
env.DebugObjectID()
env.SendLog("DebugObjectID")
env.step(300)
env.DebugObjectID(False)
DebugObjectIDcan show or hide the ID information of all objects.
2.2.3 DebugObjectPose
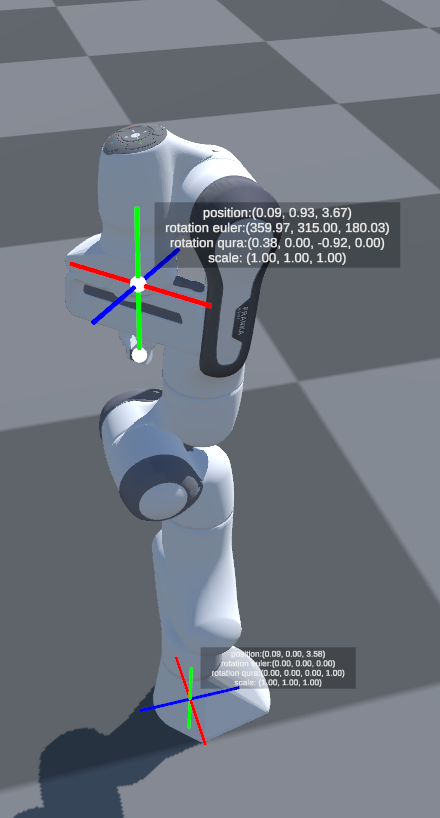
env.DebugObjectPose()
env.SendLog("DebugObjectPose")
env.step(300)
env.DebugObjectPose(False)
DebugObjectPosecan show or hide the base point coordinates, orientation, and scaling information of all objects.
2.2.4 DebugColliderBound
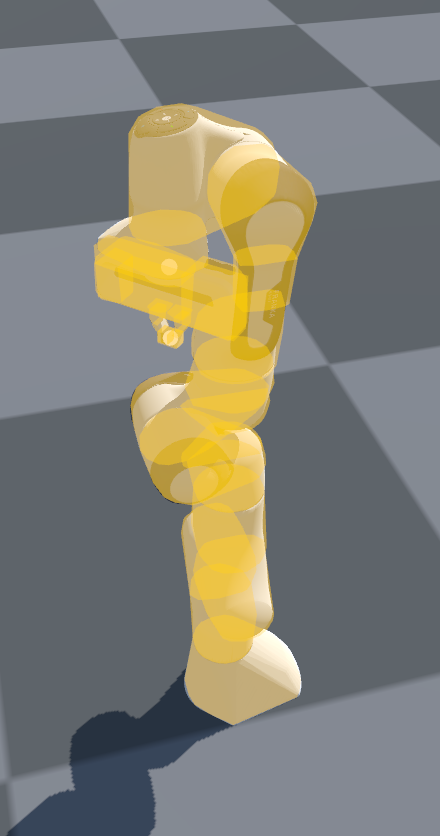
env.DebugColliderBound()
env.SendLog("DebugColliderBound")
env.step(300)
env.DebugColliderBound(False)
DebugColliderBoundcan show or hide the collision boxes of all objects.
2.2.5 DebugCollisionPair
env.DebugCollisionPair()
env.SendLog("DebugCollisionPair")
env.step(300)
env.DebugCollisionPair(False)
DebugCollisionPaircan show or hide the collision pairs of all objects.
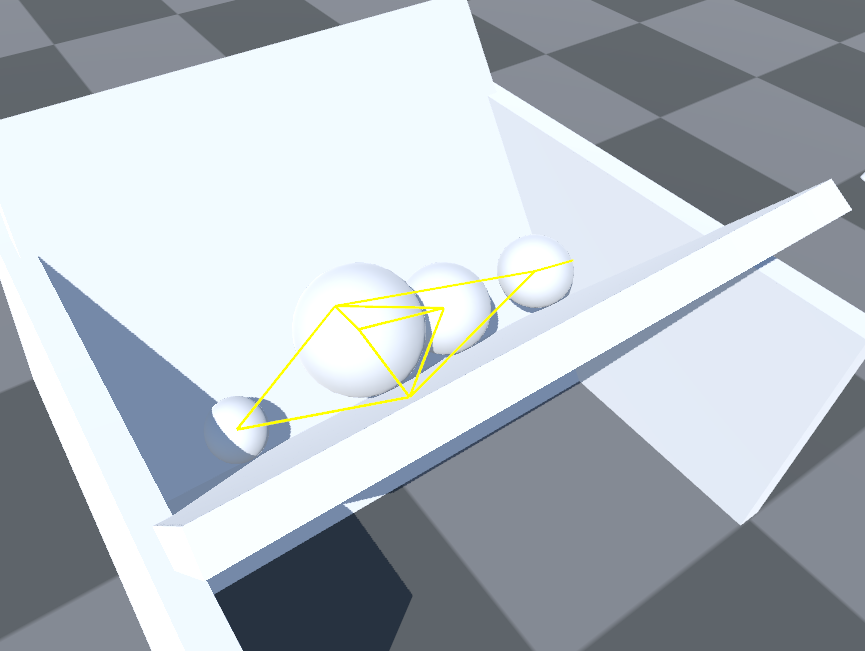
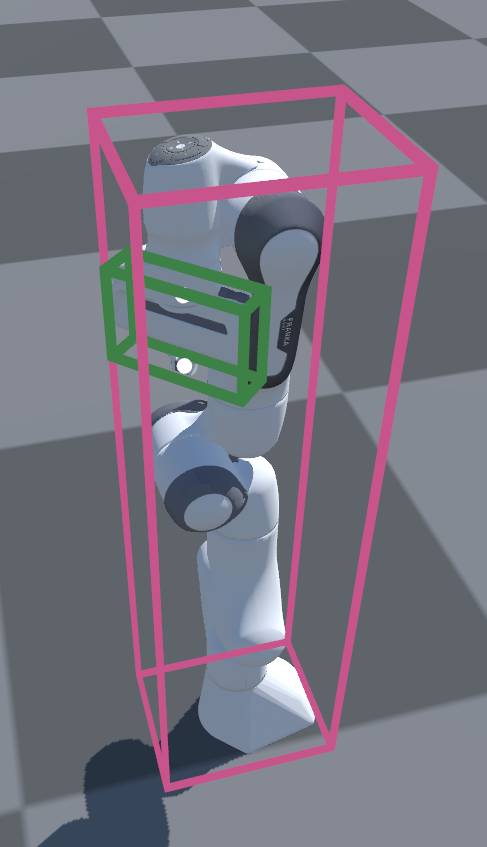
2.2.6 Debug3DBBox
env.Debug3DBBox()
env.SendLog("Debug3DBBox")
env.step(300)
env.Debug3DBBox(False)
Debug3DBBoxcan show or hide the 3D bounding boxes of all objects.
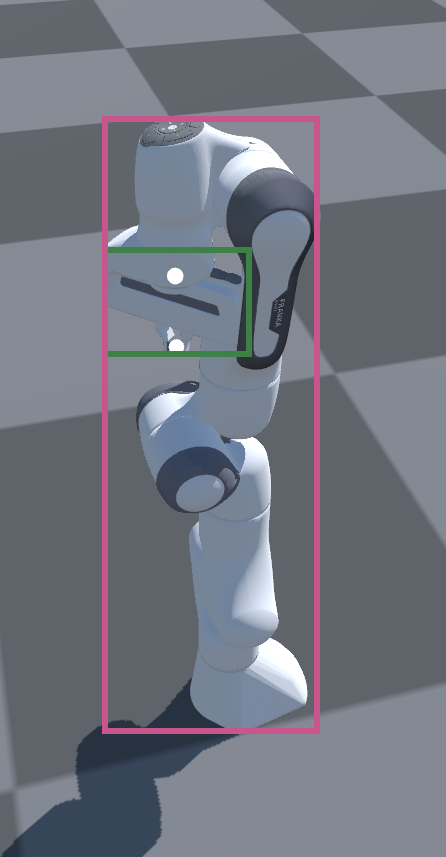
2.2.7 Debug2DBBox
env.Debug2DBBox()
env.SendLog("Debug2DBBox")
env.step(300000)
env.Debug2DBBox(False)
Debug2DBBoxcan show or hide the 2D bounding boxes of all objects.
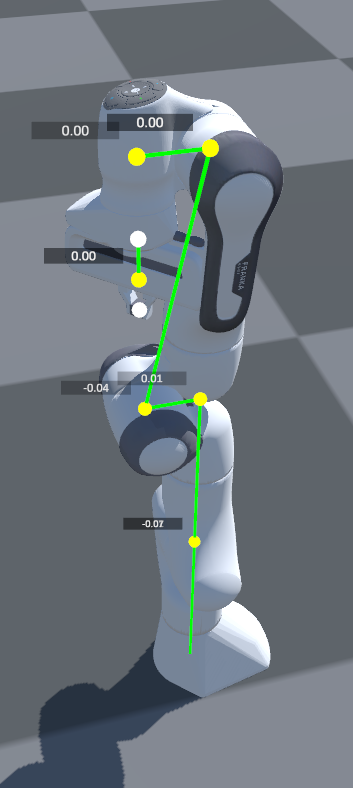
2.2.8 DebugJointLink
env.DebugJointLink()
env.SendLog("DebugJointLink")
env.step(300)
env.DebugJointLink(False)
DebugJointLinkcan show or hide all joint information.